Технологический прогресс нередко выглядит как постоянная попытка обойти саму природу: ученые ищут способы сделать устройства быстрее, мощнее и эффективнее. Но иногда самые удачные решения, наоборот, рождаются из внимательного наблюдения за природными механизмами.
Хороший пример — прыгающие пауки. Этим паукообразным нужно очень острое зрение, чтобы избегать хищников, охотиться и ориентироваться в пространстве. При этом их мозг размером примерно с маковое зерно, так что вычислительные возможности у них крайне ограничены. Поэтому оценка расстояния у них должна работать максимально эффективно. Добиться этого помогает строение глаза. В их глазах есть несколько слоев сетчатки, тогда как у человека на каждый глаз приходится только одна сетчатка. Каждый слой воспринимает изображение с немного разной фокусировкой: один может видеть объект резко, а другой в тот же момент — слегка размыто.
«Они постоянно видят сразу несколько уровней фокусировки, — объяснила в заявлении Emma Alexander, специалист по компьютерным наукам из Northwestern University. — То есть они все время получают пары изображений. Затем их мозг может сравнивать разницу в резкости, чтобы определить расстояние».
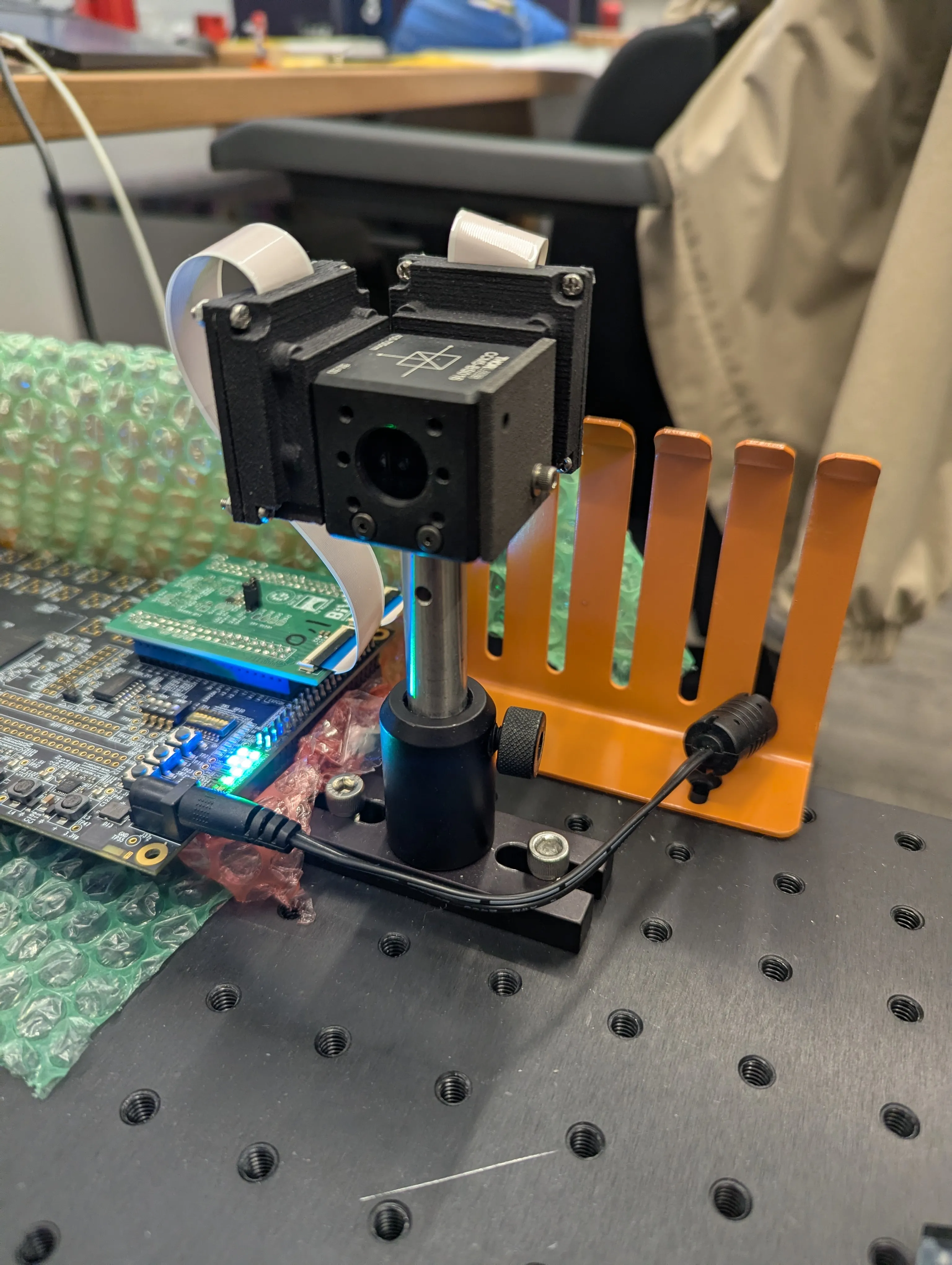
Именно эта способность вдохновила Alexander и ее коллег на создание SpiderCam — чрезвычайно энергоэффективной 3D-камеры. Команда представила исследование 7 июня на конференции Computer Vision Foundation по компьютерному зрению и распознаванию образов в Денвере, штат Колорадо.
«Мы хотели понять, можем ли использовать те же принципы, чтобы создать чрезвычайно энергоэффективный датчик глубины для сценариев с ограниченными ресурсами, где у пользователей нет неограниченного доступа к питанию», — добавила Alexander, которая также занимается bio-inspired computer vision.
SpiderCam определяет глубину примерно так же, как прыгающие пауки оценивают расстояние перед прыжком. Система получает две версии одного и того же изображения с немного разными настройками фокуса. После этого специальный алгоритм анализирует разницу в размытии между кадрами и в реальном времени переводит ее в измерения глубины. В итоге SpiderCam тратит меньше 1 Вт энергии на создание 3D-карт в реальном времени. Для сравнения: обычный ночник потребляет больше 1 Вт.
Алгоритм работает на настраиваемом компьютерном чипе, оптимизированном для энергоэффективной обработки. Этот прототип создает карты глубины со скоростью 32,5 кадра в секунду и потребляет всего 624 милливатта мощности.
«Меня особенно интересуют сценарии, где ресурсы сильно ограничены и камеру нельзя просто подключить к розетке, — сказала Alexander. — Например, ее можно использовать в полевых условиях с ограниченным питанием. Кроме того, технология выглядит особенно перспективной для задач вроде дополненной реальности, где нужно взаимодействовать с физическим миром и понимать, где находятся окружающие объекты».
Большинство 3D-камер оценивают глубину методами, которые работают хорошо, но могут требовать заметной вычислительной мощности, дополнительных затрат энергии и дорогого оборудования.
Эта разработка, вдохновленная пауками, может открыть путь к новому типу устройств с питанием от батареи — например, вспомогательным гаджетам, носимой электронике, роботам и дронам, которым нужно оценивать окружающую среду. В дальнейшем команда планирует улучшить технологию и встроить ее в небольших роботов и носимые устройства.
Такие камеры могут оказаться полезны там, где важны автономность и низкое энергопотребление: в носимой электронике, роботах, дронах и системах дополненной реальности. Если технология дойдет до серийных устройств, она позволит получать данные о глубине без сложного и прожорливого оборудования.
Читайте так же:
- Как беспилотным автомобилям «видеть» лучше: сделать их датчики более похожими на человеческое зрение
- Древние рукотворные острова Шотландии хранят множество тайн
- Ошибка «Приложение не установлено»: причины и методы исправления — пошаговый чек-лист