Чтобы помочь понять, что делает скатов такими уникальными и необычными пловцами, команда инженеров-механиков из Калифорнийского университета в Риверсайде (UCR) создала волнистый роботизированный плавник. После погружения робота в подводные туннели, предназначенные для имитации плавания вблизи морского дна, их тесты показали, что различные виды скатов, возможно, выработали альтернативные методы плавания, которые наилучшим образом подходят для их условий. В частности, полученные данные свидетельствуют о том, что некоторые виды скатов, плавающие у морского дна, регулируют движение и наклон своих плавников, чтобы противостоять направленной вниз силе, которая в противном случае притягивала бы их к земле.
Оказывается, скаты, грациозно скользящие по волнам у морского дна, делают это не для того, чтобы выглядеть круто. Вместо этого причудливые взмахи, скорее всего, являются эволюционной адаптацией для обеспечения стабильности и долговечности во время плавания. Команда, создавшая механический плавник, считает, что те же принципы однажды могут быть применены при разработке энергоэффективных роботов-картографов для подводного плавания. И они не единственные, кто восхищается скатами. Другие исследователи уже пытаются использовать опыт плавания со скатами для разработки более скрытных подводных аппаратов следующего поколения.
Исследование о роботизированных плавниках было опубликовано на этой неделе в журнале Royal Society Interface.
Испытаем скатов на прочность при плавании
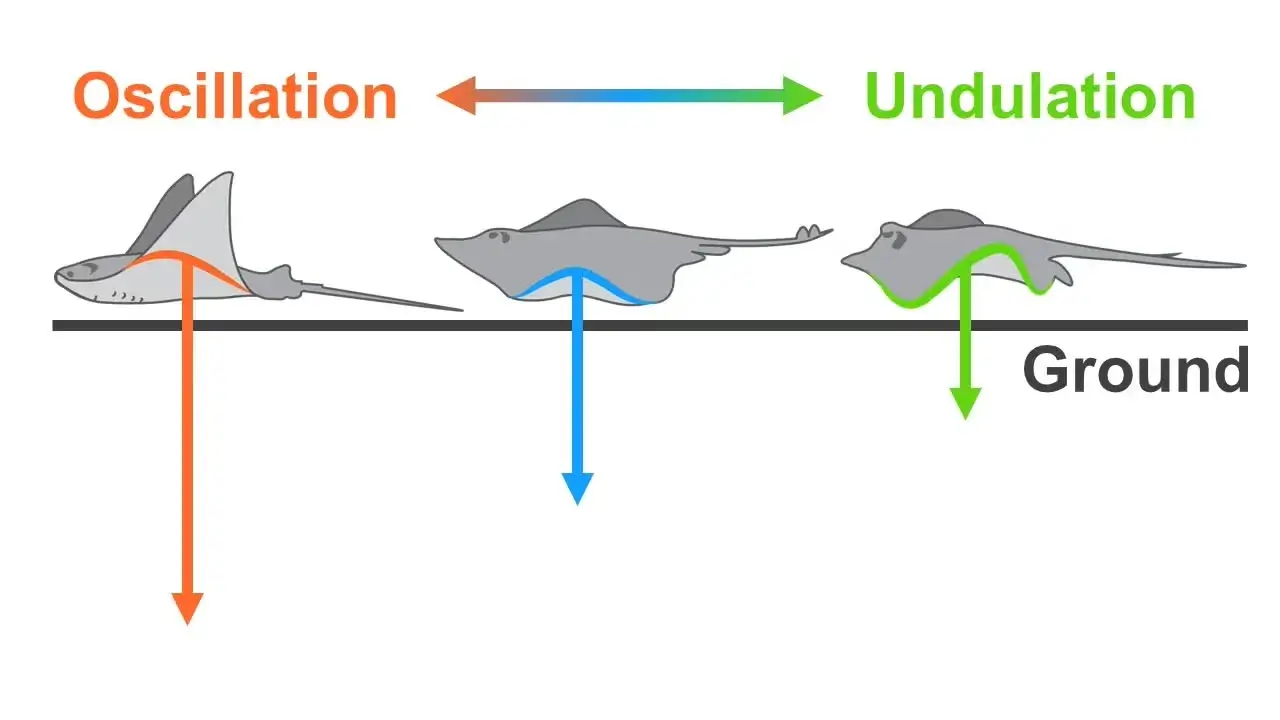
Когда дело доходит до плавания, не все виды скатов одинаковы. Массивные манты и другие виды пелагических скатов, как правило, парят у поверхности океана, совершая взмахи руками. Донные скаты, как и скаты, проводящие время на мелководье, используют другое волнообразное движение, которое часто напоминает движение тех самых волн, в которых они плавают. Этот второй волнообразный стиль плавания, в частности, очаровал ученых своей кажущейся простотой и эффективностью. Предыдущие исследования этого метода плавания показали, что волнообразные движения, используемые скатами, на самом деле, по-видимому, перерабатывают энергию из окружающей воды более эффективно, чем силовые взмахи плавниками.
Инженер-механик UCR и соавтор статьи Юаньхан Чжу предположил, что различия в стилях плавания могут быть вызваны различными условиями обитания скатов. Чтобы проверить эту теорию в контролируемых условиях, команда решила создать роботизированный плавник. Испытав плавник в различных условиях, исследователи смогли понаблюдать, как физические силы в воде влияют на его движение. Окончательный дизайн плавника имел толщину всего 9,5 миллиметра (около 0,4 дюйма) и был изготовлен из силиконовой резины. Они также построили большой водный туннель, предназначенный для имитации океанского течения.
В ходе своих экспериментов команда размещала робота как у поверхности туннеля, так и ниже, ближе к искусственному морскому дну. В обоих случаях они хотели увидеть, как различные уровни океанического течения влияют на величину подъемной силы, передаваемой на плавники. Понимание подъемной силы важно, поскольку оно играет ключевую роль в определении того, могут ли объекты, перемещающиеся в пространстве, оставаться на одном уровне. Например, птицы, летящие близко к земле, испытывают положительную подъемную силу, которая поддерживает их на более высоком уровне и устойчиво. Исследователи ожидали, что нечто подобное произойдет с роботом ray, плавающим у морского дна. Вместо этого произошло прямо противоположное. Их робота засасывало вниз.
 Плавник робота-ската
Плавник робота-ската“Это было совсем не то, чего мы ожидали”, — сказал Чжу в блоге UCR. “Вместо того, чтобы увеличить подъемную силу у земли, лучи были опущены вниз.
Удивленные результатами, команда внесла небольшие коррективы в работу робота, чтобы попытаться компенсировать отрицательную подъемную силу. Они обнаружили, что направленную вниз силу можно уменьшить, просто наклонив плавник робота вверх на несколько градусов. Исходя из этого, исследователи предполагают, что скаты и другие донные скаты естественным образом плавают с небольшим наклоном плавников вверх, что ранее было неясно. Во время тестирования волнообразные движения, подобные движениям ската, также обеспечивали больший отрыв от морского дна, чем взмахи, используемые пелагическими видами скатов.
“Природа, похоже, уже решила эту проблему”, — добавил Чжу.
Роботы и подводные аппараты будущего
Это не первый случай, когда инженеры пытаются применить уникальную биологию ската в мире робототехники. В 2018 году инженеры из Калифорнийского университета в Лос-Анджелесе разработали робота длиной 10 миллиметров на тканевой основе в стиле stingray, состоящего из сердечных клеток и гибких электродов. В 2017 году исследователи из Гарварда создали, пожалуй, еще более странного биогибридного робота stingray, работающего на мышцах крысы и приводимого в движение двигательной установкой, приводимой в действие светом.
Исследователи из Вашингтонского университета уже изучают способы применения техники плавания скатов в подводных аппаратах следующего поколения. В конечном счете, они надеются адаптировать конструктивные характеристики скатов для создания аппаратов, которые будут более энергоэффективными и бесшумными, чем современные подводные лодки и батискафы.
Когда дело доходит до проектирования механизмов будущего, мир природы остается непобедимым.